Nützliches Skript für die Optimierung der Antenne in Homematic-Systemen
Bei den funkbasierten Homematic-Modulen läuft die gesamte Kommunikation über Funk ab. Dementsprechend ist die Zuverlässigkeit des Sytemes maßgeblich von der Qualität der Funkverbindung zwischen der Zentrale (CCU, Rapberrymatic oder piVCCU) abhängig. Gerade weil dies...QuadBeam2 … die ideale Antenne für den Homematic-Funk im Mehr-Etagenhaus
Hinweis: Die QuadBeam2-Antenne ist eine Weiterentwicklung der bereits einige Jahre erfolgreich eingesetzten QuadBeam-Antenne. Die neue Version zeichnet sich durch einfacheren Nachbau aus. Die QuadBeam2-Antenne ist eine Variation der DualBeam2-Antenne insbesondere für...RoomSitter… der all-in-one Multisensor für jeden Wohnraum
1 Das alles kann der RoomSitter Anstelle von vielen Einzelsensoren sind im RoomSitter alle wichtigen Sensoren äußerst kompakt zusammengefasst, mit denen man einen Wohnraum umfassend überwachen kann. Die Wortnähe des RoomSitter zum Babysitter ist deshalb so gewählt,...Hutschienengehäuse mit variabler Breite für grössere Elektronikmodule … DIY im 3D-Druck
Eigentlich macht der 3D-Druck eines Hutschienengehäuses keinen Sinn, sollte man meinen. Aber da gibt es oft Elektronikmodule, die wegen ihrer Größe nur sehr schlecht sich in Standard-Hutschienengehäuse einpassen lassen. Ich hatte zum Beispiel eine preisgünstige...Schimmelgefahr! …Erkennung und Vermeidung mit einem einfachen HM-Skript
Das Problem Schimmel ist ein ernste Gefahr, das die Gesundheit und die Wohnqualität beeinträchtigen kann. Schimmel in Wohnräumen bildet sich, wenn die Luftfeuchtigkeit zu hoch ist und die Oberflächentemperatur der Wände zu niedrig. Schimmel kann allergische und...Einfaches Homematic-Skript zur Glättung/Mittelwertbildung von Messsignalen
Ausgangssituation Oft sind die Sensorsignale-Signale sehr dynamisch und mit regellosen Störsignalen überlagert, so daß es manchmal ganz hilfreich sein kann , wenn man diese Messsignale „glättet“. Der Elektroniker macht das meistens mit einem Tiefpass in...Der WEATHERMAN 2.1 …die ideale Wetterstation für die Hausautomation
Den WEATHERMAN 2 haben bereits sehr viele User mit großem Erfolg nachgebaut. Leider gibt es den bisher verwendeten Windmesser W132 nicht mehr zu kaufen, weshalb viele „Bastelwillige“ mich über mögliche Alternativen angeschrieben haben. Das Problem ist, daß...Impulsgeber für Gaszähler ganz einfach selbstgebaut
Rahmenbedingungen Gerade bei den hohen Gaspreisen ist eine Fernauswertung des Gaszählers bzw. eine Messung des Gasverbrauches von besonderem Interesse. Hierfür sind die verschiedenen PULSECOUNTER-Varianten mit LAN oder WLAN auf dieser Webseite besonders hilfreiche...PULSECOUNTER-LAN2 …Verbräuche von Strom, Gas und Wasser komfortabel messen
Hinweis: Den PULSECOUNTER gibt es auch als WLAN-Version! Das WLAN-Modell des PULSECOUNTER2 wird bereits von vielen Usern erfolgreich eingesetzt. Da aber der PULSECOUNTER oft im Keller und/oder in Stromkästen mit schlechter WLAN-Funkanbindung installiert werden muß,...Der PowrPilot …leistungsfähiges Stromzähler/Smartmeter-Interface für die Hausautomation
Warum diese Entwicklung? Der Auslöser für dieses Projekt war bei mir die Installation meiner Photovoltaik-Anlage, die einherging mit der notwendigen Installation eines neuen Stromzählers. Dabei kommen heute nicht mehr die alten Ferrariszähler mit Drehscheibe zur...Stromzähler/Smartmeter mit dem PULSECOUNTER 2 auslesen
Was können digitale Stromzähler/Smartmeter? Leider ist die Frage nicht so einfach zu beantworten, weil die Bandbreite der technischen Eigenschaften bei digitalen Stromzählern und Smartmetern recht groß ist. Da gibt es die einfachen Wechselstromzähler (ein oder...Verbräuche Strom, Wasser, Gas, Solar komfortabel messen mit dem PULSECOUNTER2-LAN
Hinweis: Den PULSECOUNTER2 gibt es auch als WLAN-Version! Das WLAN-Modell des PULSECOUNTER2 wird bereits von vielen Usern erfolgreich eingesetzt. Da aber der PULSECOUNTER oft im Keller und/oder in Stromkästen mit schlechter WLAN-Funkanbindung installiert werden muß,...Quad-Beam-Antenne für Häuser mit mehreren Etagen/Betondecken
Hinweis: Diese Antenne hat einen Nachfolger die QuadBeam2-Antenne. Mehr dazu hier. Warum das Ganze? Eine tragende Funktion bei der Homematic-Hausautomation ist eine gute/zuverlässige Funkverbindung zwischen der Zentrale(CCU) und den Funk-Sensoren und -Aktoren....Funkeigenschaften bei Raspberry-Homematic verbessern mit räumlich abgesetztem Funkmodul
Zunehmend verwenden Homematic-Anwender einen Raspberry als CCU entweder mit der Original-Software oder mit den verschiedenen Alternativen wie Raspberrymatic, piVCCU, debmatic. Neben dem Raspberry wird bei dieser Konfiguration nur noch ein Funkmodul benötigt, das auf...AirSniffer-CO2 …die CO2-Ampel für Wohnräume
Hinweis: Es gibt eine Serie von verschiedenen AirSniffern, die teilweise unterschiedliche Sensorik haben, aber alle die gleiche Basis-Firmware verwenden : Der AirSniffer ist die „voll ausgebaute“ Basisversion mit Sensorik für die Luftqualität (BME680) und...PULSECOUNTER-2 … komfortabel Verbräuche von Strom, Wasser, Gas und Solar messen
Hinweis: Den PULSECOUNTER gibt es auch als LAN-Version! Hier gibt’s weitere Informationen zur Verwendung des PULSECOUNTER 2 für die Auslesung von digitalen Stromzählern/Smartmetern Das Vorgängermodell der PULSECOUNTER-1 wurde schon von vielen Usern verwendet,...AirSniffer-mini …für die Messung der Raumluftqualität
Hinweis: Der AirSniffer-mini ist die „kleine Version“ des AirSniffer. Unterschied ist der Verzicht auf die Partikelmessung und ein deutlich kleineres Gehäuse. 1. Motivation Die Motivation für die Entwicklung des AirSniffer waren die vielen Diskussionen zur...Der AirSniffer …schlechte Luft kann man messen!
1. Motivation Die Motivation für die Entwicklung des AirSniffer waren die vielen Diskussionen zur Luftqualität in Innenstädten. Für mich persönlich ist aber weniger interessant, wie die Luftqualität draußen auf der Straße ist, sondern viel wichtiger ist mir die...Der WEATHERMAN-2 … die ideale Wetterstation für die Hausautomation
Hier wird die nächste Generation meiner Wetterstation WEATHERMAN-2 beschrieben. Viele Erfahrungen von meiner ersten Wetterstation sind in dieser Entwickung berücksichtigt worden. Herausgekommen ist eine Wetterstation, die alle für die Hausautomation wichtigen...WIFFI-pump-4 …energiesparende Steuerung der Zirkulationspumpe und Heizungsüberwachung
Der WIFFI-pump-4 ist ein hardwaremäßig überarbeiteter WIFFI-pump-2. Hauptunterschied zu den vorhergehenden Versionen ist die Verwendung eines hochgenauen Temperatursensors DS18B20 für die Messung der Vorlauftemperatur. anstelle des bisher verwendeten...Der GRADMESSER …8fach-Temperaturmessung im ganzen Haus
1 Warum dieses 8-fach-Temperatur-Messmodul? Temperatursensoren für die Hausautomation gibt es zuhauf. Allerdings meist nur als Einfach- oder Zweifach-Sensor. Um die Wärmeverteilung im ganzen Haus oder die Wärmeverteilung in einer Heizungstherme genauer zu analysieren,...WEATHERMAN-Edition …die kompakte Wetterstation für’s SmartHome
Warum eine „Edition“ vom WEATHERMAN? Der WEATHERMAN hat mittlerweile schon viele Freunde gefunden, die mit Erfolg und viel Spass das Gerät nachgebaut haben. Die Eigenschaften des Gerätes erfüllen sehr gut die Anforderungen für die Verwendung mit der...CCU3 boxed …mit Raspberry 4 und Dualbeam-Antenne
Mittlerweile gibt es ja schon ein Reihe von Software-Varianten für die Verwendung als moderne CCU für die Homematic. Neben der Original CCU3 Software gibt es als bekannteste Vertreter die RasberryMatic und die piVCCU. Alle diese Varianten bauen auf dem...Homematic Usertreffen 2019: Intelligente Rollladensteuerung
Wer den Vortrag als Video anschauen möchte , bitteschön: https://www.youtube.com/watch?v=kLuUA9yjvbQ Und hier ist das Sonnenstands-Skript: [codesyntax lang=“php“] !berechnung sonne_elevation, sonne_azimut; stand 07.08.2016 verfasser: eugen stall, stall.biz...Intelligenter IMPULSGEBER-W mit S0-Schnittstelle zum Nachrüsten für konventionelle Wasserzähler
Nach dem gleichen Funktionsprinzip gibt es hier auch einen Impulsgeber für die Ferrarisscheibe des Stromzählers. Smarthome und die Wasserwerker Eigentlich wollte ich diesen Impulsgeber gar nicht entwickeln, weil es ja Wasserzähler mit integriertem Reedkontakt für nur...WEATHERMAN-1 … die perfekte Wetterstation für die Hausautomation
Wichtiger Hinweis: Mittlerweile gibt es einen neue Version WEATHERMAN-2 1 Warum eine besondere Wetterstation für die Hausautomation ? Ursprünglich wollte ich ja gar keine Wetterstation selber bauen, sondern wollte die für die Homematic vorgesehene Wetterstation...RAINYMAN … der leistungsfähige Multisensor für Regen, Sonne, Klima, Bodenfeuchte und mehr!
1 Der RAINYMAN ist der kleine Bruder des WEATHERMAN Den WEATHERMAN als leistungsfähige Wetterstation für die Homematic und andere Hausautomationssysteme haben schon viele mit großem Erfolg nachgebaut. Bei einigen Usern kam in letzter Zeit der Wunsch nach einer...Der WIFFI-3 …die Raumsonde nicht nur für das Wohnzimmer
1. Der WIFFI-3.0 in Kürze Der WIFFI-3.0 ist ein weiteres sehr leistungsfähiges Modul einer Reihe von Sensor- und Aktor-Modulen, die hauptsächlich zur Erweiterung und Ergänzung der Hausautomation mit der Homematic konzipiert sind. Die WIFFI´s sind allesamt...Wintergarten-Lüftungsfenster mit der Homematic intelligent steuern
Wintergärten sollten immer wirkungsvolle Lüftungselemente haben weil sonst bei Sonnenschein es schnell viel zu heiß wird. Bei mir zuhause sind zwei große Lüftungsfenster im Dachbereich, so daß in Verbindung mit Öffnungsmöglichkeiten im unteren Wintergartenbereich eine...Externe Antenne am Raspberry mit neuem Funkmodul RPI-RF-MOD
Original haben die Homematic Aufsteckmodule RPI-RF-MOD nur ein Stückchen Draht als einfache sog Lambda-Viertel-Antenne. Für funkmäßig günstige Wohnverhältnisse reicht das meistens aus. Aber immer häufiger hat man Wohnungen und Häuser mit viel Beton oder oder...Homematic Usertreffen 2018: Was man über Antennen für die drahtlose Hausautomation wissen sollte
_____________________________________________________________________________________________________________________________________________________________...Homematic Usertreffen 2018: Die WIFFI’s…. neue leistungsfähige, universelle Sensor- und Aktormodule
______________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________...Der PULSECOUNTER-1… 4-fach Zählermodul für Strom, Gas, Wasser und Solar
Wichtiger Hinweis: Mittlerweile gibt es eine neue Version PULSECOUNTER-2 1 Warum diese Entwicklung? Die mir bekannten Zählermodule sind für mich nicht so überzeugend. Sie zählen zwar die Impulse von den Verbrauchszählern, aber zur halbwegs praktikablen Nutzung und...Intelligenter Impulsgeber 2.1 mit S0-Schnittstelle für konventionelle Stromzähler
Nach dem gleichen Funktionsprinzip gibt es hier auch einen Impulsgeber für den konventionellen Wasserzähler. Wichtiger Hinweis: in meinem Webshop werden sowohl der (preiswertere) Standard-Impulsgeber mit manueller Einstellung/Justage angeboten als auch dieser neue...Wiffi-wz mit Präsenzmelder für Deckenmontage
[google-translator] Ausgangssituation Mittlerweile nutzen viele Homematic-User den Wiffi-wz als ideale Möglichkeit, einen Wohnraum wie beispielsweise das Wohnzimmer mit verschiedenen Sensoren zu erfassen, so daß mit diesen Signalen verschiedene...DualBeam … die HM-Antenne für besonders schwierige Funkbedingungen
Hinweis: Es gibt mittlerweile eine verbesserte DualBeam2-Antenne Warum die Antenne so wichtig ist ! Man kann nicht oft genug wiederholen, daß bei Funksystemen die Antenne die wichtigste Komponente ist. Leider wird gerade diesem Teil von Entwicklern manchmal wenig...WIFFI-voice … Hausautomation mit Ansage
1 Wofür den WIFI-voice ? Die Reihe der verschiedenen WIFFIs wird mit dem WIFFI-voice folgerichtig ergänzt. Während der WIFFI-wz mit seiner Sensorik hauptsächlich für die Hauptwohnräume wie das Wohnzimmer gedacht ist, kann man den WIFFI-voice für nahezu alle anderen...WIFFI-pump-2… die intelligente Steuerung der Zirkulationspumpe mit Heizungsüberwachung
Wichtiger Hinweis: Mittlerweile gibt es eine neue Version WIFFI-pump-4 Die Vorgeschichte Ich verwende meine intelligente Steuerung für die Trinkwasser-Zirkulationspumpe schon seit Jahren. Dafür habe ich eine Lösung mit einem Mikrocontroller Attiny entwickelt , die...Perfekte Videoüberwachung mit preiswerten Kameras und einem NAS
[google-translator] Vorweg… Ja ich habe eigentlich schon viele negative Erfahrungen mit verschiedenen Billig-Überwachungskameras mit WLAN (im folgenden von mir einfach IPCAMs genannt) sammeln können. Mit dem Preisverfall kam schon vor Jahren der Wunsch auf, eine...Der WIFFI-WZ 2.0 … der Wohnzimmersensor
Update 05.10.2018 : JSON an beliebige IP mit beliebigem Port „sendbar“ Das ist der WIFFI-WZ ! Der WIFFI-WZ ist das erste Modul einer Reihe von weiteren Sensor- und Aktor-Modulen, die hauptsächlich zur Erweiterung und Ergänzung der Hausautomation mit...Universelles Astro/Zeit-Skript für Rolladen, Lampen …
[google-translator] Im Homematic Zeitmodul fehlen eine Reihe wichtiger Zeitfunktionen wie Datumsbereiche, Monate, Wochentage und Kalenderwochen. Aber besonders die Astrofunktion ist unbefriedigend, weil man nur selten genau zum Sonnenaufgang(SA) oder...WIFFI-wz … der Multifunktionssensor nicht nur für´s Wohnzimmer
[google-translator] Der WIFFI … kurz und knapp! Der WIFFI-wz ist das erste Modul einer Reihe von zukünftig geplanten weiteren Sensor- und Aktor-Modulen, die hauptsächlich zur Erweiterung und Ergänzung der Hausautomation mit der Homematic konzipiert sind. Die...Externe Antenne für RaspberryMatic, OCCU, HM-MOD-RPI-PCB
Weniger Fehlermeldungen und ein stabileres HM-System mit externer Stabantenne Original haben die Homematic Aufsteckmodule HM-MOD-RPI-PCB nur ein Stückchen Draht als einfache sog Lambda-Viertel-Antenne. Für funkmäßig günstige Wohnverhältnisse reicht das meistens aus....Externe Stabantenne für viele HM-Funkmodule
Weniger Fehlermeldungen und ein stabileres HM-System mit externer Stabantenne Original haben die drahtlosen HM-Module im Gehäuse nur ein Stückchen Draht als einfache sog Lambda-Viertel-Antenne. Für funkmäßig günstige Wohnverhältnisse reicht das meistens aus. Aber...Externe Flachantenne für die Homematic und Vergleich mit anderen Antennen
Warum überhaupt eine externe Antenne ? Als Funkamateur hat man vielleicht ein anderes Verhältnis zur Hochfrequenz. Aber jeder Anfänger lernt als Erstes, daß die Antenne der beste Hochfrequenzverstärker ist. Die Antenne ist einfach das A und O einer Sende- und...Für schwierige Funkbedingungen: 2 externe Antennen an einer CCU
[google-translator] Daß man mit einer externen Antenne an der CCU oder anderen HM-Modulen die Stabilität des heimischen Funknetzes erheblich verbessern kann, haben bereits viele Homematiker praktisch ausprobiert. Die folgenden Links geben dazu mehr Informationen:...ESP8266 mit externer WLAN-Antenne für WIFFI, WeMos …
1 Ausgangssituation Für viele Projekte in der Hausautomation werden die sehr leistungsfähigen und preisgünstigen Mikrocontroller der ESP8266 -Reihe verwendet. Dabei gibt es Versionen mit verschiedenem Layout und unterschiedlicher Anzahl von Ports. Sie werden mit dem...Homeduino 4.0 … das universelle Sensor- und Aktormodul für die Hausautomation
[google-translator] Update 13.11.2020: angepasste 8181-Requests für neue CCU2/3 -Firmware Was ist der Homeduino? Der Homeduino ist ein Selbstbauprojekt , mit dem der interessierte Hausautomatisierer mit einfachen Mitteln preiswerte und sehr leistungsfähige Module für...IO-Shield-Plus (neue Version) … mehr Inputs und integriertes WLAN
[google-translator] Vorgeschichte: Auf dieser Webseite sind verschiedene Bauanleitungen mit Verwendung der äußerst vielseitigen und preiswerten Arduino-Module im Zusammenspiel mit der Homematic vorgestellt. Zur einfachen Anwendung auch für den weniger versierten...Homematic User-Treffen 2016: Alternative Aktoren und Sensoren mit Homeduino, WIFFI & Co.
____________________________________________________________________________________________________________________________________ _____________________________________________________________________________________________________________________________________...Homematic User-Treffen 2016: Rollladen- und Lichtsteuerung mit dem Sonnenstandsskript
______________________________________________________________________________________________________________________________________ _____________________________________________________________________________________________________________________________________...Tutorial: So funktioniert die Homematic WebUI-Logik
Eigentlich scheint die Programmierung einer Homematic doch eine ganz einfache Sache zu sein. Die WENN…DANN-Sprache entspricht ja auch unserer Denklogik, aber speziell die Homematic WebUI-Logik hat mir persönlich anfangs doch einige Verständnisprobleme bereitet....Robuster Sonnensensor ganz einfach !
Ein Sonnensensor ist sehr wichtig zur Steuerung der Rolladen , Jalousien und Markisen. Viele verwenden hierfür einen Helligkeitssensor, aber die große Dydnamik des Helligkeitssignals ist mit normalen Helligkeitssensoren meist nur unbefriedigend abzubilden, weshalb ich...Tutorial: So steuert man Rolladen, Jalousien, Markisen mit der Homematic
Update 10.08.2015: – Änderungen im Programm roll_nacht_anders, roll_schatten_pgm, roll_nacht_pgm – Systemvariable roll_zeit_hh_mm hinzugefügt – Alternative kompaktere Rolladen-Programme , Methode 2 in Schritt 9 Update 25.10.2015: –...Homeduino 3.0 … das ultimative IO-Modul für die Hausautomation
IO-Shield-Plus … mehr Inputs und integriertes WLAN
[google-translator]Vorgeschichte: Auf dieser Webseite sind verschiedene Bauanleitungen mit Verwendung der äußerst vielseitigen und preiswerten Arduino-Module im Zusammenspiel mit der Homematic vorgestellt. Zur einfachen Anwendung auch für den weniger versierten...USV für Homematic-CCU2 und Raspberry mit wirkungsvollem Überspannungsschutz
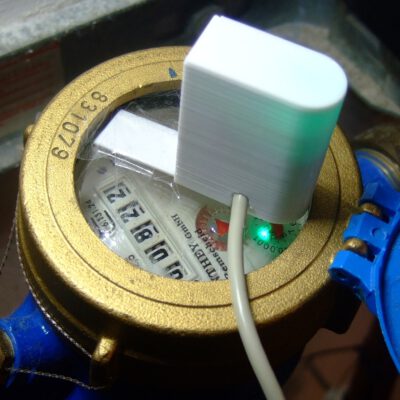
[google-translator]Motivation für eine unterbrechungsfreie Stromversorgung (USV) ? Das Stromnetz ist in den meisten Gegenden Deutschland eine relativ zuverlässige Sache. Langanhaltende Stromunterbrechungen sind sehr selten. Aber kurze Stromunterbrechungen sind gar...Impulsgeber für den Wasserzähler selbst gebaut
Update: Hier ist die deutlich verbesserte Version als Bausatz Warum ein Impulsgeber für den Wasserzähler so schwierig ist! Im Rahmen der Hausautomation ist die Information über die aktuellen Verbräuche von Strom,Gas und Wasser relativ wichtig, weil diese ...Der Homeduino 2.0 mit CC3000-Wifi-Shield als Sensormodul für die Homematic
Der Homeduino 2.0 als vielseitiges LAN/WLAN-Sensormodul für die Homematic
Vielseitiges I/O-Shield-Board 2.0 für (fast) alle Arduinos
[google-translator]Hier wurde bereits ein universelles I/O-Shield Board für den Arduino beschrieben und für Interessierte einige Komplettbausätze mit SMDs zur Verfügung gestellt. Allerdings ist das Löten von SMDs doch nicht jedermanns Sache, weshalb jetzt ein neues...Homeduino …der universelle LAN/WLAN-Arduino für die Hausautomation mit I/O-Shield 2.0
Homeduino …der universelle LAN/WLAN-Arduino für die Hausautomation mit I/O-Shield 1.0
Trinkwasser-Zirkulationspumpe intelligent geschaltet mit oder ohne Homematic-Anbindung
Wichtiger Hinweis: Dieses Modul gibt es mittlerweile auch mit OLED-Display. WIFFI-pump-2 1. Einige grundsätzliche Gedanken Eine Warmwasser-Zirkulation ist ein in der Hausinstallation heute oft eingesetztes Komfortmerkmal, um an allen Zapfstellen im Haus nahezu sofort...WIFFI-pump… die Zirkulationspumpensteuerung mit Heizungsüberwachung
[google-translator] Wichtiger Hinweis: Mittlerweile gibt es eine neue Version WIFFI-pump-4 Vorgeschichte Ich verwende eine intelligente Steuerung für die Trinkwasser-Zirkulationspumpe schon seit Jahren. Dafür habe ich eine Lösung mit einem Mikrocontroller Attiny...Homeduino mit I2C-Barometer-Sensor und LCD-Display für die Homematic
[google-translator]Update 14.11.2014: In der Beschreibung fehlte die Angabe der weiteren Systemvariablen homeduino_fehler als Logikwert Zur Einstimmung auf das Thema: Die Welt des Arduinos bietet viele Möglichkeiten, mit preiswerten Sensoren und Modulen sehr...Analogausgang und PWM mit Homematic-Schaltaktor realisieren
1 Ein paar Worte vorweg… Zugegeben, bei der Hausautomation braucht man nicht so oft analoge Ausgänge. Aber ich suchte eine Möglichkeit für eine analoge Füllstandsanzeige und da hat man im aktuellen HM-Produktportfolio leider keine Wahl. Zwar gibt es...Praxistaugliches, universelles I/O-Shield-Board für Arduino
[google-translator]Hierzu gibt es ein Update: https://www.stall.biz/?project=vielseitiges-io-shield-board-2-0-fur-fast-alle-arduinos Ausgangssituation: Die Verwendung von den verschiedenen Arduino -Typen auch im Bereich der Hausautomation ist deshalb so attraktiv,...Wunderground Wetter mit einfachem HM-Skript holen
Anmerkung 04.06.2019: Offensichtlich vergibt Wunderground keine kostenlose API-Keys mehr. Deshalb unbedingt vorher zu dem Thema die geeigneten Informationen einholen! In einem anderen Blog wurde sehr ausführlich und gut beschrieben, wie man die Wetterdaten von...Sonnenstandsberechnung für die intelligente Betätigung von Rolladen, Markisen und Lampen
[google-translator] Update 24.12.2020: Nutzung bei der RaspberryMatic Grundlagen Die Sonnenposition wird beschrieben mit der Sonnen_Elevation (Winkel zur Horizontalen) und dem Sonnen_Azimut (Winkel in der Horizontalen, von Norden aus gemessen wie bei der...Externe Antenne an CCU2 für ein stabiles HM-Funknetz
[google-translator]In einem früheren Beitrag hatte ich beschrieben, wie man eine externe Antenne für die Homematic selbst baut und wie man dafür einen Antennenanschluss an der CCU1 anbringt....Externe CCU1 Antenne: mehr Reichweite,weniger Fehlermeldungen
[google-translator]1 Warum das Ganze ? Ich hatte recht häufig Fehlermeldungen, die mit dem hier im Forum beschriebenen Scripten zwar deutlich reduziert werden konnten, aber dennoch schien mir die Ursache damit nicht behoben. Auch die Reichweite der Fernbedienungen...schnell ansprechender Regensensor
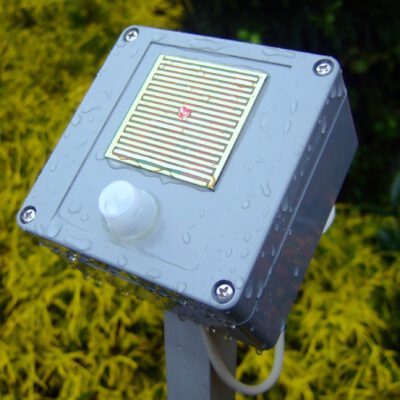
[google-translator]Zum Thema Regensensor findet man im FHZ- Forum über 600 Fundstellen, die einerseits den Bedarf und die Notwendigkeit aufzeigen andererseits aber auch die Problematik geeigneter Sensoren . Auch ich habe eine „bewegte“...Regensensor, Regenmelder mal ganz anders
[google-translator]Die preiswerten Regensensoren von Kemo und Conrad basieren auf dem Prinzip der einfachen Widerstandsmessung und haben demnach insbesondere bei fast reinem Regenwasser ein Leitfähigkeitsproblem. Einzig der Regenmelder von Hygrosens scheint wirklich...Robuster Bodenfeuchtesensor für den Ausseneinsatz
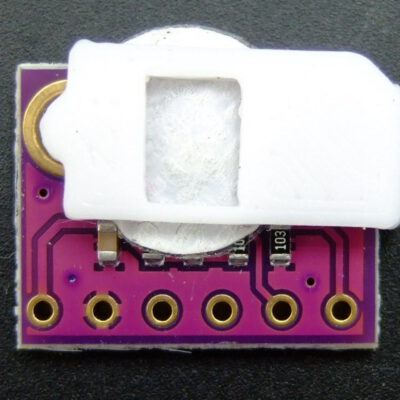
Ein Bodenfeuchtesensor wird normalerweise für die Steuerung der Bakonblumen-Bewässerung als auch für die Garten-Bewässerung eingesetzt. Das Thema ist von der Sensorik recht anspruchsvoll, weil eine einfache ohmsche Widerstandsmessung mit Gleichstrom ungewollte...Zufallsgenerator Skript für Anwesenheitssimulation, Lampen..
[google-translator]Für die Simulation der Anwesenheit werden gerne die Lampen oder die Rolladen oder was auch immer möglichst zufällig ein und ausgeschaltet. In den meisten Programmiersprachen gibt es für die Programmierung geeignete Algorithmen sog. Randomfunktionen,...Einfache Modifikation eines Homematic-Temperatursensors als Analogeingang
[google-translator]Leider gibt es keinen Homematic-Funksensor mit Analogeingang. Deshalb habe ich einen normalen Funk-Temperatursensor zum Analogeingang umfunktioniert. Wie diese Baubeschreibung zeigt, ist dies sogar ohne Lötarbeit oder Änderungen an der...WIFFI-pump … die neue Zirkulationspumpensteuerung mit Heizungsüberwachung
[google-translator] Wichtiger Hinweis: Dieses Modul gibt es mittlerweile auch mit OLED-Display. WIFFI-pump-2 Vorgeschichte Ich verwende eine intelligente Steuerung für die Trinkwasser-Zirkulationspumpe schon seit Jahren. Dafür habe ich eine Lösung mit einem...868Mhz-Funksignal ansehen mit DVB-T Stick
[google-translator]Es kann sehr hilfreich sein, die Sendesignale der Homematic sich mal genauer anzusehen. Bisher waren hierfür teure Empfänger notwendig, die in diesem Zusammenhang den Aufwand sicher nicht rechtfertigen. Dazu kommt, daß die Funkaussendungen meist nur...Aktuelle Bausätze
-
 WIFFI-3.0 Bausatz
65,90 € inkl. MwSt.
WIFFI-3.0 Bausatz
65,90 € inkl. MwSt.
-
 PowrPilot …das leistungsfähige Stromzähler/Smartmeter-Interface für die Hausautomation
49,90 € inkl. MwSt.
PowrPilot …das leistungsfähige Stromzähler/Smartmeter-Interface für die Hausautomation
49,90 € inkl. MwSt.
-
 ATTINY85 als Ersatzteil programmiert für IMPULSGEBER
9,90 € inkl. MwSt.
ATTINY85 als Ersatzteil programmiert für IMPULSGEBER
9,90 € inkl. MwSt.
-
 WIFFI-pump-2 die perfekte Zirkulationspumpensteuerung mit Heizungsüberwachung
49,90 € inkl. MwSt.
WIFFI-pump-2 die perfekte Zirkulationspumpensteuerung mit Heizungsüberwachung
49,90 € inkl. MwSt.
-
 Komplettbausatz DualBeam-Antenne
38,90 € inkl. MwSt.
Komplettbausatz DualBeam-Antenne
38,90 € inkl. MwSt.
-
 AirSniffer-CO2 ... die Ampel zum richtigen Lüften
67,90 € inkl. MwSt.
AirSniffer-CO2 ... die Ampel zum richtigen Lüften
67,90 € inkl. MwSt.
-
 Impulsgeber mit S0-Schnittstelle für konventionelle Stromzähler
18,90 € inkl. MwSt.
Impulsgeber mit S0-Schnittstelle für konventionelle Stromzähler
18,90 € inkl. MwSt.
-
 IO-Shield20
26,90 € inkl. MwSt.
IO-Shield20
26,90 € inkl. MwSt.
-
 DualBeam2 ... die perfekte Antenne für Homematic-Funk-Sticks
32,90 € inkl. MwSt.
DualBeam2 ... die perfekte Antenne für Homematic-Funk-Sticks
32,90 € inkl. MwSt.
-
 Sonnensensor Glaskuppel
4,90 € inkl. MwSt.
Sonnensensor Glaskuppel
4,90 € inkl. MwSt.
-
 WEATHERMAN Ersatz Regenmelder Sensorplatine
14,90 € inkl. MwSt.
WEATHERMAN Ersatz Regenmelder Sensorplatine
14,90 € inkl. MwSt.
-
 WIFFI-pump4 die perfekte Zirkulationspumpensteuerung mit Heizungsüberwachung
63,90 € inkl. MwSt.
WIFFI-pump4 die perfekte Zirkulationspumpensteuerung mit Heizungsüberwachung
63,90 € inkl. MwSt.
-
 Intelligenter IMPULSGEBER-W mit S0-Schnittstelle für konventionelle Wasserzähler
41,90 € inkl. MwSt.
Intelligenter IMPULSGEBER-W mit S0-Schnittstelle für konventionelle Wasserzähler
41,90 € inkl. MwSt.
-
 PULSECOUNTER-Hutschiene
58,40 € inkl. MwSt.
PULSECOUNTER-Hutschiene
58,40 € inkl. MwSt.
-
 AirSniffer-mini zur Messung der Luftqualität
54,90 € inkl. MwSt.
AirSniffer-mini zur Messung der Luftqualität
54,90 € inkl. MwSt.
-
 Wetterkappe für Temperatur und Feuchtesensor BME280 / BMP280
17,90 € inkl. MwSt.
Wetterkappe für Temperatur und Feuchtesensor BME280 / BMP280
17,90 € inkl. MwSt.
-
 CCU3_boxed ... für Pi4 mit optionaler Dualbeam-Antenne
27,90 € inkl. MwSt.
CCU3_boxed ... für Pi4 mit optionaler Dualbeam-Antenne
27,90 € inkl. MwSt.
-
 RAINYMAN-Controller
62,30 € inkl. MwSt.
RAINYMAN-Controller
62,30 € inkl. MwSt.
-
 PTFE-Druckausgleichsmembran für BME280 und BMP280
5,90 € inkl. MwSt.
PTFE-Druckausgleichsmembran für BME280 und BMP280
5,90 € inkl. MwSt.
-
 WEATHERMAN-Edition 2
69,90 € inkl. MwSt.
WEATHERMAN-Edition 2
69,90 € inkl. MwSt.
-
 Der GRADMESSER ...8fach-Temperaturmessung im ganzen Haus
74,90 € inkl. MwSt.
Der GRADMESSER ...8fach-Temperaturmessung im ganzen Haus
74,90 € inkl. MwSt.
-
 RoomSitter... der all-in-one Multisensor für jeden Wohnraum
69,90 € inkl. MwSt.
RoomSitter... der all-in-one Multisensor für jeden Wohnraum
69,90 € inkl. MwSt.
-
 IR-Lesekopf für Stromzähler
19,90 € inkl. MwSt.
IR-Lesekopf für Stromzähler
19,90 € inkl. MwSt.
-
 WIFFI-WZ 2.0 mit BME280
75,00 € inkl. MwSt.
WIFFI-WZ 2.0 mit BME280
75,00 € inkl. MwSt.
-
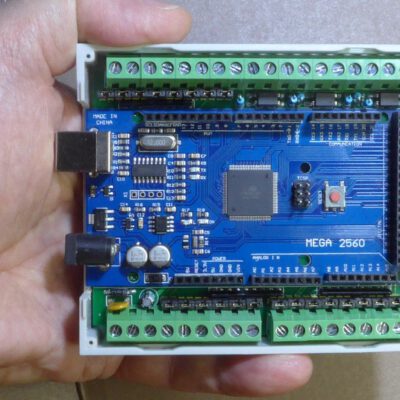 MEGA-IO-Shield ... das ultimative Shield für die Hausautomation
29,90 € inkl. MwSt.
MEGA-IO-Shield ... das ultimative Shield für die Hausautomation
29,90 € inkl. MwSt.